Solid angle
The solid angle under which an object is seen from an observation point\(O\) is the ratio between the area of the conical projection of the apparent contour of this object on a sphere centered at \(O\), by the square of the radius of the sphere ( figure 2.1).
This quantity, which is the ratio between a surface and the square of a distance, is expressed in steradians (sr). It represents the extension in space of the notion of angle which is generally defined in a plane. We have

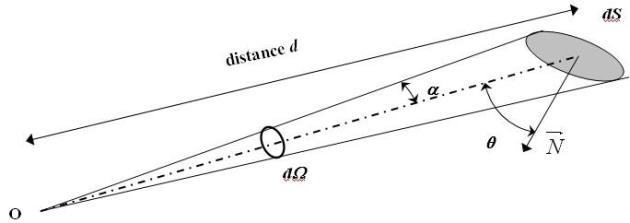
If the object is planar and if its transverse dimensions are small compared to its distance from point \(O\), the elementary solid angle will be expressed
\(dS\) being the real surface of the object and \(\theta\) being the angle between the normal of the object and the direction of observation (figure 2.2). The term \(dscos\text{ }\theta\) is the apparent surface of the object in the direction of obliquity whose factor is \(dscos\text{ }\theta\) .
If the object is perceived in the form of a disk of radius \(R(dS=\pi R^{2}) \)whose angular radius \(\alpha\) (half angle at the vertex) is small then the solid angle for this object is given by (figure 2.3)

Let us now consider an elementary solid angle defined by a ring of radius \(R\) whose average angular radius is \(\alpha\) and the angular width \(d\alpha\). The disk of radius \(R\) has a surface \(S=\pi R^{2} \)and for a variation \(dR\) of the radius, the surface of the crown \(dS=2\pi RdR\) (figure 2.3). The solid angle is therefore
as \(\text{tan} (\alpha )=\frac{R}{d}\) and \(d\alpha =\frac{dR}{d}\), he comes :

For a cone of revolution with half angle at the vertex \(\alpha_{M}\), the solid angle is given by

The solid angle corresponding to a half space is given by
and for the entire space we have