

Coordonnées homogènes dans le plan
Définition : Matrice
Une matrice est un tableau de nombres, utilisée plus particulièrement en algèbre linéaire.
Définition : Addition de deux matrices
Addition :

On peut additionner deux matrices si leurs tailles, nombre de lignes et de colonnes, sont identiques.
La règle générale est

où
 désigne l'élement de la matrice en ligne i et colonne j.
désigne l'élement de la matrice en ligne i et colonne j.
Définition : Produit de deux matrices
Produit matriciel :
La règle générale est

Si A a n lignes et m colonnes et B a p lignes et q colonnes alors le produit de A par B a N lignes et q colonnes et le nombre de colonnes de A doit être égal au nombre de lignes de B m=p.
Exemple : Exemple de produits matriciel
Quelques exemples :

Définition : Transposée d'une matrice
La transposée d'une matrice est obtenue en échangeant les lignes et les colonnes.
Si
 alors la transposée de A notée
alors la transposée de A notée
 est égale à
est égale à

Rappel : produit scalaire de deux vecteurs
Soient deux vecteurs de composantes
 et
et
 le produit scalaire de
le produit scalaire de
 est égal à
est égal à
 .
.
Il peut se mettre sous la forme matricielle suivante :

Définition : Droite
Une droite dans le plan est définie par l'équation :

Remarque : Droite et points sous forme matricielle
Un point A
 appartient à la droite D d'équation ax+by+c si
appartient à la droite D d'équation ax+by+c si

Un point dans le plan est représenté un vecteur à 3 composantes.
Si le point de coordonnées
 appartient à la droite alors le point de coordonnées
appartient à la droite alors le point de coordonnées
 appartient aussi à la droite.
appartient aussi à la droite.
Un point de coordonnées
 représente donc un point du plan
représente donc un point du plan

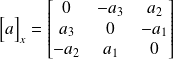
Définition : Produit vectoriel
Le produit vectoriel de deux vecteurs

 est égal à :
est égal à :
 avec
avec
Définition : Intersection de deux droites du plan
Deux droites
 et
et
 se coupent en un Point M dont les coordonnées homogènes sont
se coupent en un Point M dont les coordonnées homogènes sont

Exemple : Intersection de droites
Soient deux droites d'équation x+y+3=0 et 2x+y+1=0.
L'intersection de ces droites est donnée par le produit vectoriel de [1 1 3] et [2 1 1].
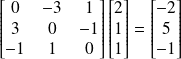 soit en coordonnées homogènes le point
soit en coordonnées homogènes le point

Exemple : Intersection de droites parallèles
Soient deux droites d'équation x+y+3=0 et x+y+5=0.
L'intersection de ces droites est donnée par le produit vectoriel de [1 1 3] et [1 1 5].
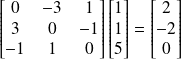 soit en coordonnées homogènes le point
soit en coordonnées homogènes le point
 Le point est à l'infini !
Le point est à l'infini !
Remarque : Deux droites parallèles se coupent à l'infini ?
Cette propriété peut sembler mathématique mais a deux nombreuses applications pratiques en dessin comme en traitement d'images.
 | Les droites parallèles dans le monde réel se coupent avant l'infini dans une perspective. Les droites parallèles doivent converger vers le même point (point de fuite) |
Les droites [1 2 3] et [1 2 5]. se coupent à l'infini en [2 -1 0].
Définition : Matrice de passage et changement de repère
Soit une base B1=(e1,...,en) et d'une base B2=(f1,...,fn). On appelle matrice de passage de B1 à B2 la matrice carrée de taille n dont la j-ième colonne est formée des coordonnées de fj dans la base B1. Autrement dit, la matrice de passage de B1 à B2 est la matrice des nouveaux vecteurs de base exprimés en fonction des anciens.
Soit e un vecteur de E, X1 ses coordonnées dans B1, X2 ses coordonnées dans B2, et soit P1,2 la matrice de passage de B1 à B2. Alors on a :
X1=P1,2X2
Exemple : Rotation de 90°
Le repère B1 est
 et le repère B2 est
et le repère B2 est
 avec
avec
 et
et

 | La matrice de passage est donc :
Dans la première colonne on retrouve les coordonnées de
|


Les coordonnées dans B2 de
 =[1 0]T sont dans B1 données par la relation matricielle :
=[1 0]T sont dans B1 données par la relation matricielle :


Les coordonnées dans B1 de
 =[0 1]T sont dans B2 données par la relation matricielle :
=[0 1]T sont dans B2 données par la relation matricielle :

Définition : Changement de repère en coordonnées homogènes
En coordonnées homogènes l'origine du repère peut être déplacé. On ajoute une colonne, la translation associée au déplacement, à la matrice de passage. Si la matrice de passage pour passer du repère B1 à B2 est
 et la vecteur translation [tx ty^]T alors la matrice de passage sera :
et la vecteur translation [tx ty^]T alors la matrice de passage sera :
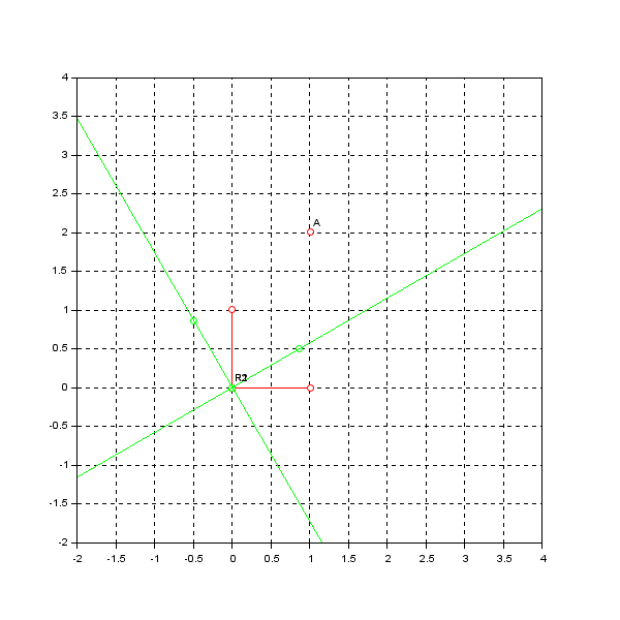
Exemple : Changement de repère dans le plan
On reprend l'exemple précédent :
Le repère B1 est
et le repère B2 est
avec
et
on ajoute une translation de vecteur
 . la matrice de passage est donc :
. la matrice de passage est donc :
Soit un point, de coordonnées [x1 y1 1]T dans B1, de coordonnées de coordonnées [x2 y2 1]T dans B2, et soit P1,2 la matrice de passage de B1 à B2. Alors on a : [x1 y1 1]T=P12[x2 y2 1]T Par exemple l'origine du repère B2 a pour coordonnées P12[0 0 1]T dans B1, soit [2 1 1]T. De même l'origine du repère B1 a pour coordonnées P12(-1)[0 0 1]T dans B1, soit environ [-2.232 0.134 1]T. |  |




