Attention, votre navigateur ne supporte pas le javascript ou celui-ci a été désactivé. Certaines fonctionnalités dynamiques de ce module sont restreintes.
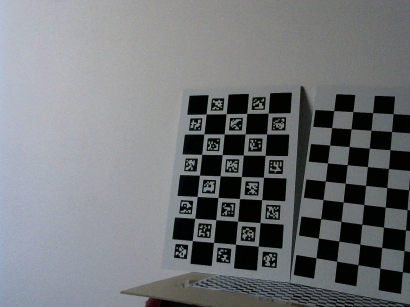
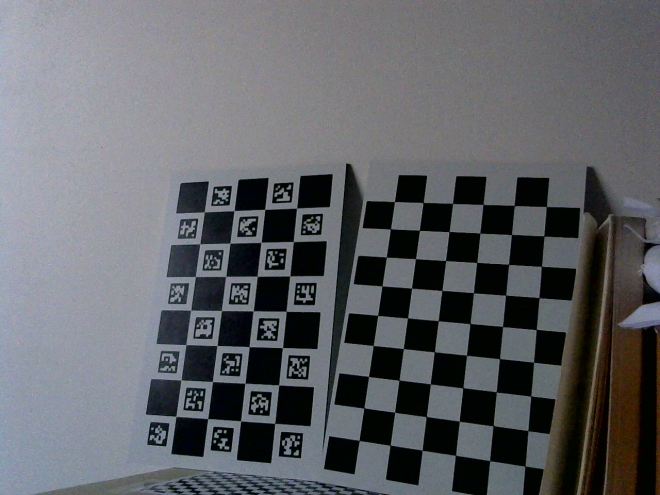
Nous avons deux images, gauche et droite, issues d'un système de stéréovision calibrés.
La matrice permettant de passer du repère de la caméra droite est pour la rotation R et la translation T avec
et
R=[9.9962651494979227e-01, 2.5790743443857449e-02,9.0370438720773025e-03;
-2.6084139798057931e-02,9.9908102589010461e-01, 3.4010606542245206e-02;
-8.1515802350278239e-03, -3.4233627604873640e-02,9.9938061342047391e-01];
T=[-1.3684263616413589e-01, 3.0722609576000217e-03,4.6290117536837688e-03];
R=[9.9962651494979227e-01, 2.5790743443857449e-02,9.0370438720773025e-03; -2.6084139798057931e-02,9.9908102589010461e-01, 3.4010606542245206e-02; -8.1515802350278239e-03, -3.4233627604873640e-02,9.9938061342047391e-01]; T=[-1.3684263616413589e-01, 3.0722609576000217e-03,4.6290117536837688e-03];
Les matrices de calibrage des caméras sont :
Calculer la matrice essentielle en utilisant la formule :
E=
0.0000957
-0.0047299
0.0029129
0.0035118
-0.0045652
0.1367997
0.0004983
-0.1367961
-0.0046819
Calculer la matrice fondamentale en utilisant la formule suivante :
F=
-6.992D-09
0.0000003
-0.000454
-0.0000003
0.0138704
0.0000753
0.013493
1
Déterminer les coordonnées du pixel situé en haut à gauche de l'échiquier (CHARUCO)
dans l'image gauche
et l'image droite
Coordonnées du pixel situé en haut à gauche (image gauche)
x = 644 et y = 357
Coordonnées du pixel situé en haut à gauche (image droite)
x = 397 et y = 411
En utilisant la matrice fondamentale, déterminez l'équation de la droite épipolaire associé au pixel de l'image gauche
A = 0.0003351
B = -0.0139165
C = 5.8657627
Le point de l'image droite appartient-il à la droite épipolaire trouvé ?
Déterminer les coordonnées du pixel situé en bas à droite de l'échiquier (CHARUCO)
x = 808 et y = 771
x = 534 et y = 822
A = -0.0001932
B = -0.0138205
C = 11.464534